
ROS 初级 - PR2 Simulator 安装
版权声明:本文为 DLonng 原创文章,可以随意转载,但必须在明确位置注明出处!
学习完 ROS Wiki 的基础教程后,我下一步选择学习 PR2 模拟器:
http://wiki.ros.org/pr2_simulator/Tutorials
于是就按照官网找到这个教程,但是要先安装 PR2 和 gazebo_ros 包才可以,这里记录下自己的安装过程和踩过的坑。
一、安装 gazebo_ros_pkgs
运行教程中的第一行命令:
$ roslaunch gazebo_ros empty_world.launch
[empty_world.launch] is neither a launch file in package [gazebo_ros] nor is [gazebo_ros] a launch file name
The traceback for the exception was written to the log file
这个原因是 gazebo_ros_pkgs 未安装,那就按照 gazebo 给的安装教程来安装它:
sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
可是期间出现了依赖问题,我就换 Aptitude 安装来自动安装依赖关系:
sudo apt install aptitude
然后重新安装 gazebo-ros 包:
sudo aptitude install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
安装完后,又出现 rosrun 命名找不到,我猜想应该是安装过程中 aptitude 勿删除了,不过没关系,重新安装下 ROS_Base 就行了:
sudo apt-get install ros-kinetic-ros-base
测试下:
source ~/catkin_ws/devel/setup.bash
roscore &
rosrun gazebo_ros gazebo
出现 GUI 界面即安装成功:

二、安装 PR2 模拟器
注意下,因为 zsh 不支持通配符安装,所以要先在 .zshrc 末尾加上 setopt nomatch,然后就支持通配符安装了:
然后就可以使用下面的方式安装 PR2 了:
sudo apt-get install ros-kinetic-pr2-*
安装需要挺久,建议找个好点的网速下载。
三、测试 PR2
先启动 roscore:
roscore
这里要再注意下,如果你联着网,那可能启动不了 roscore,这是你需要在 .bashrc 或者 .zshrc 末尾加上下面 2 行:
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
然后我们一次性加载 PR2 到 Gazebo:
roslaunch pr2_gazebo pr2_empty_world.launch
加载成功如下:
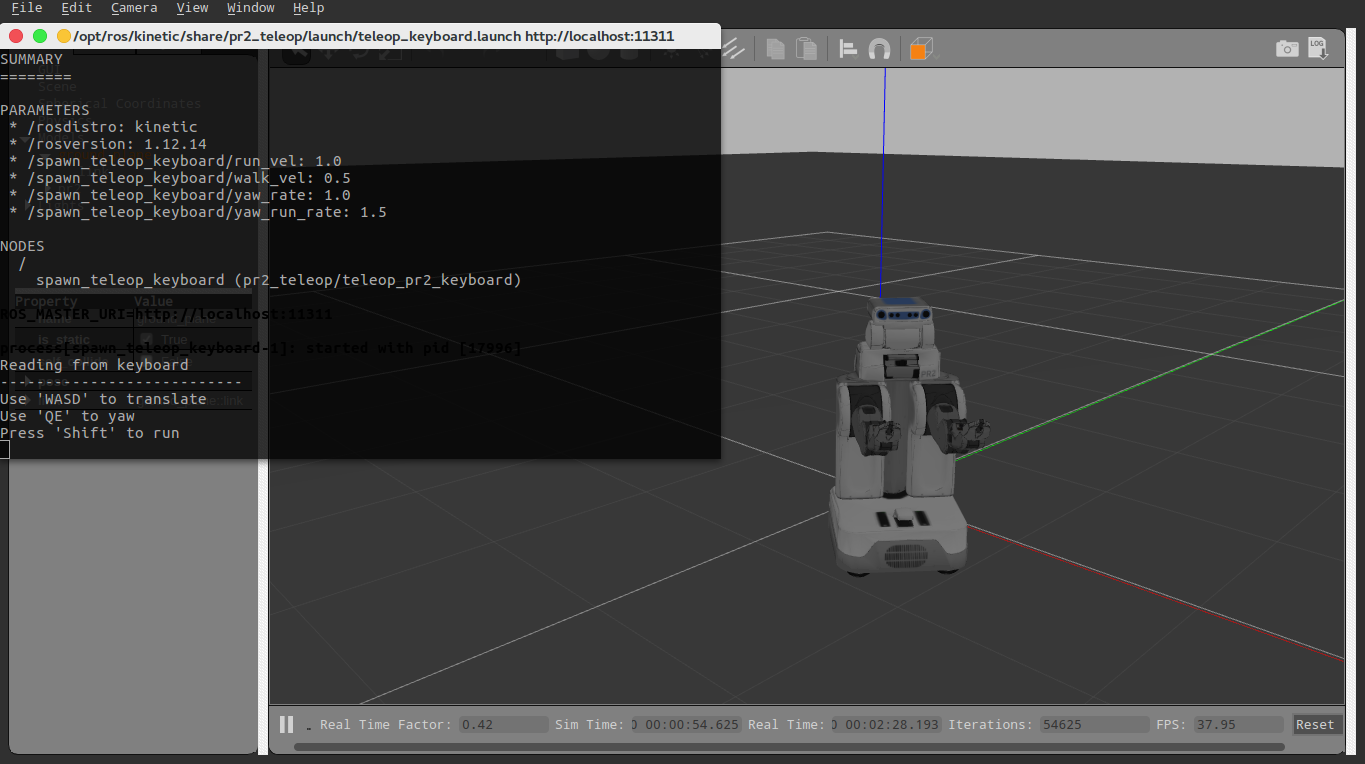
然后启动键盘控制节点,测试是否能够控制 PR2 移动和旋转:
roslaunch pr2_teleop teleop_keyboard.launch
利用键盘把机器人移动到面前,搞定了!
今天就到这,后续会更新更多关于 PR2 的学习笔记,欢迎感兴趣的朋友持续关注,我是新手,内行大哥们嘴下留情。。。。
另外,我的机器人学习笔记会同步更新到我的 Github,推荐关注: https://github.com/DLonng/Robot
本文原创首发于微信公号「登龙」,分享机器学习、算法编程、Python、机器人技术等原创文章,扫码即可关注!

DLonng at 08/07/19