
ROS 初级 - 编写简单的发布者和订阅者(C++)
版权声明:本文为 DLonng 原创文章,可以随意转载,但必须在明确位置注明出处!
0、学习设计模式
掌握设计模式中的观察者和发布订阅模式,以后设计系统会用到很多设计模式。
1、Writing Publisher Node
ROS 系统的 Publisher 节点可以自动广播消息,核心代码:
1)ROS 初始化
ros::init(argc, argv, "talker");
2)定义主题
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
3)设置发布频率 10 Hz
ros::Rate loop_rate(10);
4)发布消息
chatter_pub.publish(msg);
loop_rate.sleep();
2、Writing Subscriber Node
编写一个订阅者对象来接受发布者的消息,核心代码:
1)ROS 初始化
ros::init(argc, argv, "listener");
2)订阅发布者的主题
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
3)设置订阅者的回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg) {
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
4)自旋,等待发布者的消息到来
ros::spin();
5)订阅者接收到发布者的消息后,自动调用回调函数。
3、编译
先在 CMakeList.txt 文件中添加发布者和订阅者的编译选项以及依赖的库文件:
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker beginner_tutorials_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener beginner_tutorials_generate_messages_cpp)
进入主工作空间,make:
cd ~/catkin_ws
catkin_make
4、测试
make 之后,来测试下订阅者是否能够收到发布者的消息。
1)启动 ros
roscore
2)运行 Publisher
确定 Shell 环境:
cd ~/catkin_ws
source ./devel/setup.zsh
启动 talker:
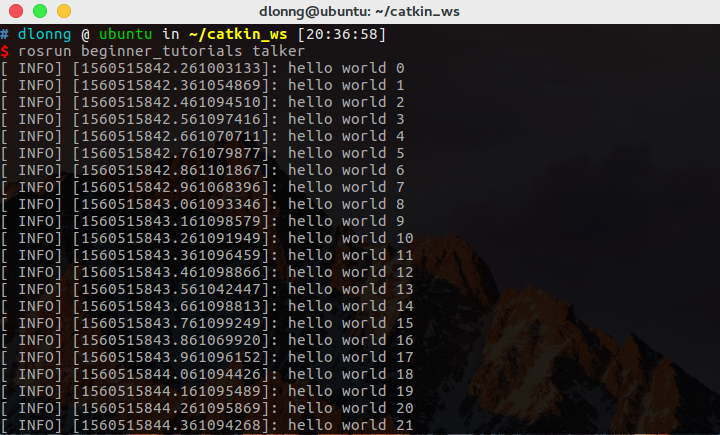
rosrun beginner_tutorials talker
启动成功:
3)启动 Listener
开启新终端,确定 Shell 环境:
cd ~/catkin_ws
source ./devel/setup.zsh
启动 Listener:
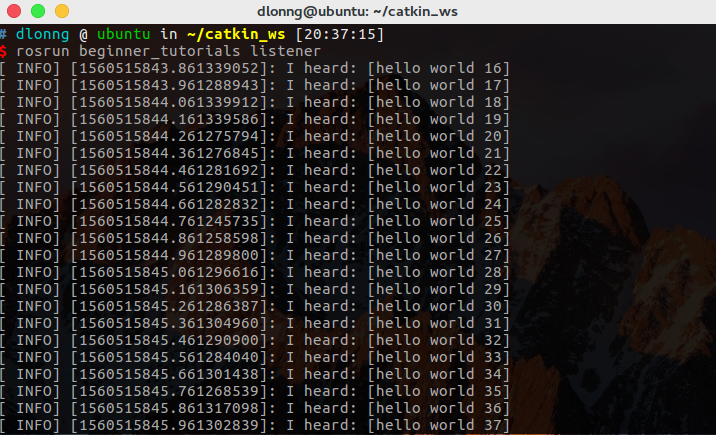
rosrun beginner_tutorials listener
Listener 接收到 Publisher 的消息了:
搞定!
本文原创首发于微信公号「登龙」,分享机器学习、算法编程、Python、机器人技术等原创文章,扫码即可关注!

DLonng at 06/14/19