
ROS 初级 - 安装 ROS Fuerte
版权声明:本文为 DLonng 原创文章,可以随意转载,但必须在明确位置注明出处!
安装 Kinetic 请查看下一篇文章!
最近跟导师聊天,他要求暑假把 ROS 系统学会,所以这里记录自己的学习过程,昨天搭好了 ROS 环境,今天就跟大家分享一下自己的搭建步骤。
1、选择 ROS 版本
我用的是 Fuerte 版本,其实初学没必要纠结版本,只是我有一本 ROS 的书用的是 Fuerte,所以我就安装它了,不过不同的版本安装过程大同小异。
我参考的官网安装教程:ROS Fuerte Install
学习 ROS 一定要好好利用官网 wiki.ros.org 上的教程。
2、安装 VMware10
因为是学习使用,所以在虚拟机里跑 Ubuntu 方便点,直接装真机有点麻烦,就不折腾了。
我用的 VMware10,官网下载地址:
https://download3.vmware.com/software/wkst/file/VMware-workstation-full-10.0.0-1295980.exe
直接复制链接到迅雷里面下载会很快,不要直接到官网下。
我的 Github 上有注册码软件,下载下来就有注册码了:VMware10 注册码
如果你使用 VirtualBox 虚拟机软件,官网已经提供了已经配置好的环境:VirtualBox ROS,不过还是建议你自己动手配置一下。
3、下载 Ubuntu 12.04
ROS Fuerte 要求 Ubuntu 12.10 之前的版本,比较好的选择是 Ubuntu 12.04,下载地址:Ubuntu 12.04
推荐用迅雷种子下载,比较快和稳定,我下载是 x64 版本:ubuntu-12.04-desktop-amd64.iso.torrent
4、安装 Ubuntu 12.04
安装过程其实非常简单,网上的教程很多,这里就不详细说了,不想找的可以看看这篇:VMware10 Install Ubuntu
基本步骤是:新建虚拟机基本步骤 -> 导入 iso 镜像文件使用简易安装 -> 等待自动安装完成。
如果网速不好,给你 2 个快速安装的小技巧:
- 安装过程开始不要选择联网下载程序
- 语言包安装时间挺长,网速不好的话也可以跳过,以后开机还可以安装的。
注意:输入的 Root 密码不要忘记了,后面要用的。
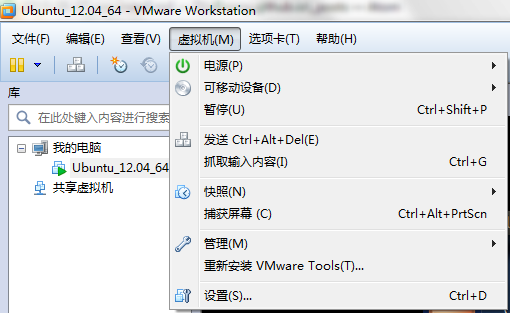
5、安装 VMTools
Ubuntu 系统安装完成之后,为了以后使用方便,我们再安装一个 VMTools,VMWare 可以自行安装,如下点击安装 VMTools 即可:
点击后,Ubuntu 会弹出 VMTools 的文件夹,我们直接把压缩包解压到桌面,然后打开 shell 进入 VMTools 文件夹,再使用超级权限执行安装即可:
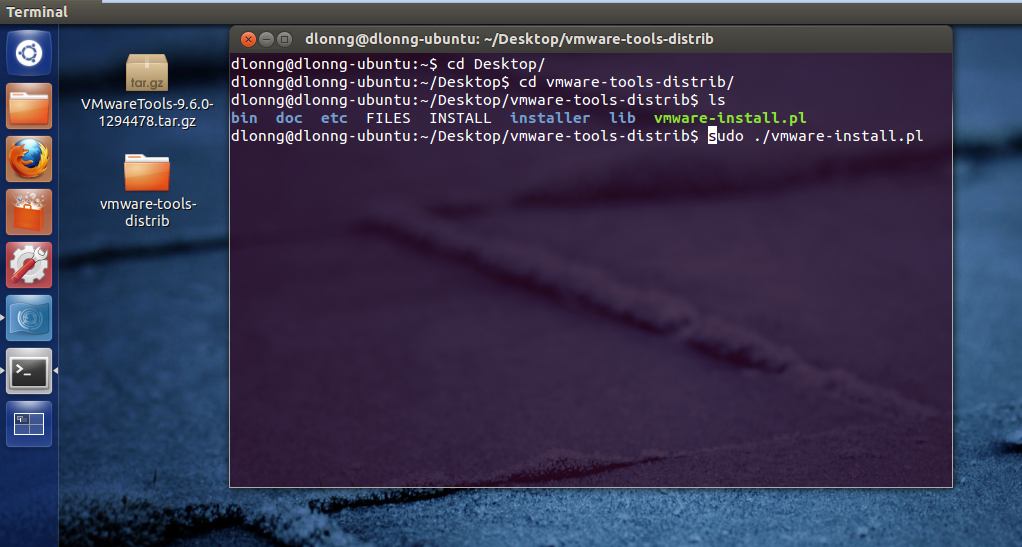
安装过程一路回车(yes)就行了,安装完重启,Ubuntu 系统就可以全屏,并且能执行和 Win 的复制粘贴功能了,非常方便学习。
6、安装 ROS Fuerte
我参考的官网安装步骤:Ubuntu 12.04 Install ROS Fuerte
6.1 配置软件源
「Ctrl + Alt + T」打开 Shell 终端,键入:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu precise main" > /etc/apt/sources.list.d/ros-latest.list'
6.2 设置 keys
这一步是为软件源设置密码,直接继续键入:
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
6.3 更新软件源
继续键入如下命令来更新刚刚配置的软件源:
sudo apt-get update
6.4 桌面完整安装
新手推荐这种最简单的安装方式,虽然安装包比较大,一共 768 MB 左右,建议找个好的网来安装,但安装完以后就不需要再配置啥了,省的麻烦:
sudo apt-get install ros-fuerte-desktop-full
静静等待安装完成吧,如果最后提示安装有错误,那可以尝试重新安装,重新安装只会重装失败的安装包。
6.5 配置 Shell 环境
如果你现在在 shell 中键入 roscore 会发现命令无法找到,那是因为我们还没有配置 ros 的环境变量,键入:
echo "source /opt/ros/fuerte/setup.bash" >> ~/.bashrc
这个命令意思是让 shell 知道到哪里去找 ros 程序,我们再键入:
. ~/.bashrc
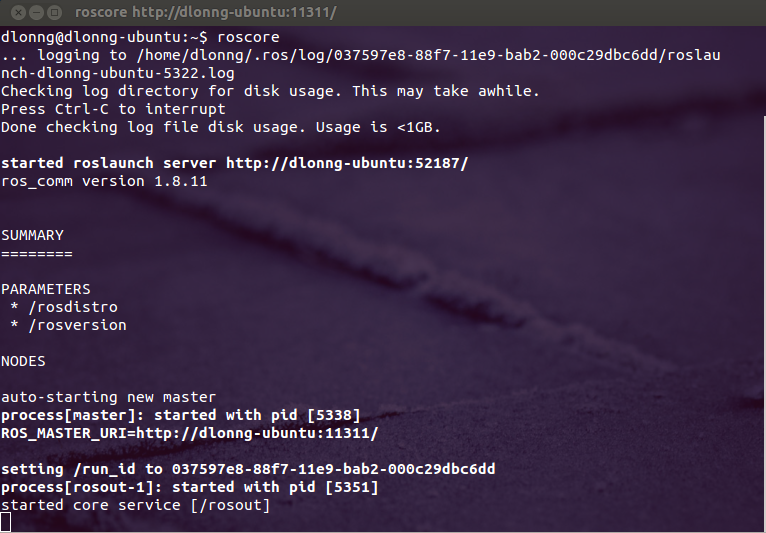
这个命令相当于更新当前 shell 的环境变量,我们再次启动 ros:
roscore
ros 启动啦,环境搭建成功!
6.6 安装 2 个小工具
为了以后更好的学习 ros,官网建议我们安装如下两个工具,具体是干嘛的,我们到时候用到再说吧:
sudo apt-get install python-rosinstall python-rosdep
7、总结
ROS Fuerte 的环境这就搭建完成了,其他版本搭建可能有些细微的差别,建议以 ROS 官网教程为主。
环境配置过程需要一点 Linux 命令基础,不熟悉的同学可以翻翻我之前写过的 Linux 基础文章,相信会对你有用的。
本文原创首发于微信公号「登龙」,分享机器学习、算法编程、Python、机器人技术等原创文章,扫码即可关注!

DLonng at 06/07/19