
ROS 初级 - 理解 ROS Topics
版权声明:本文为 DLonng 原创文章,可以随意转载,但必须在明确位置注明出处!
ROS Topics 在 ROS 学习中非常重要,所以自己总结了下对 Topics 的学习过程。
0、启动环境
先启动 ros:
roscore
再启动乌龟节点和键盘控制乌龟节点:
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
当把窗口焦点定位到键盘控制节点的 Shell 后,按键盘的方向键就可以控制小乌龟了,如下:
1、什么是 ROS Topics ?
不知道你有没有思考过上面的小乌龟是如何动起来的?其实它们就是通过 ROS Topics 来传递键盘数据。
turtlesim_node 和 turtle_teleop_key 通过一个 ROS Topics 来相互通信。
turtle_teleop_key 不断的将键盘数据发布到一个 Topics 中,而 turtlesim_node 节点订阅到同一个的 Topics 来不断地接收键盘数据,并做出响应。
ROS 也给我们提供了查看节点和主题运行状态的工具 rqt_graph,来看看如何使用它。
2、使用 rqt_graph
如果没有安装,则先安装,我用的 K 版本:
sudo apt-get install ros-kinetic-rqt
sudo apt-get install ros-kinetic-rqt-common-plugins
然后启动它:
rosrun rqt_graph rqt_graph
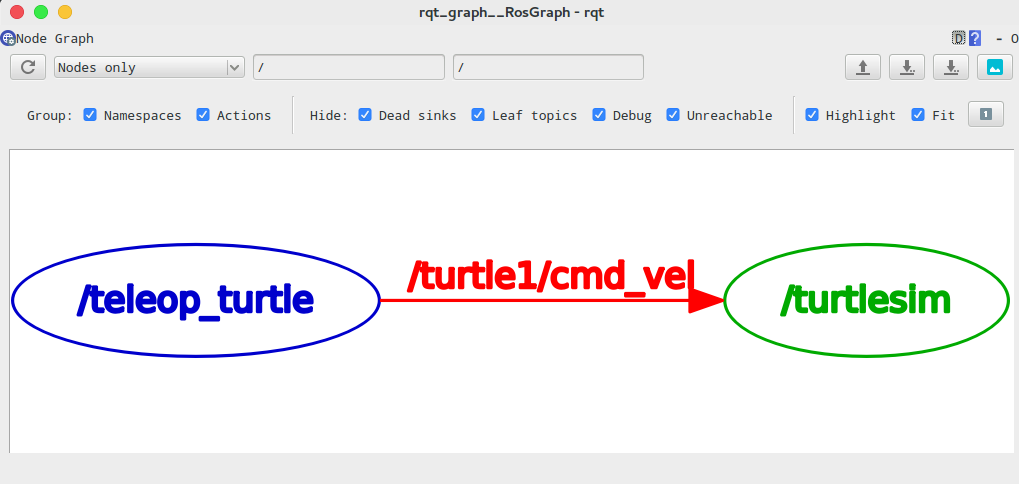
当你把鼠标放到 /turtle1/cmd_vel 上时,两个 ROS 节点分别为蓝色和绿色,而 topics 则为红色。
这两个 nodes 通过主题 /turtle1/cmd_vel 来进行通信。
3、使用 rostopic
ROS 提供了一个 rostopic 工具来得到 ROS topics 的信息。
rostopic echo
使用 echo 可以显示发布在主题中的数据:
# rostopic echo [topic]
rostopic echo /turtle1/cmd_vel
执行后,终端并没有任何响应,因为我们还没有给它数据,我们切换到使用键盘控制小乌龟的 Shell,移动方向键,即可看到 echo 终端有数据打印出来:
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
现在我们再次打开 rqt_graph 程序,点击左上角的刷新按钮,即可看到增加了一个新的 rostopic 节点订阅到 /turtle1/cmd_vel 主题:
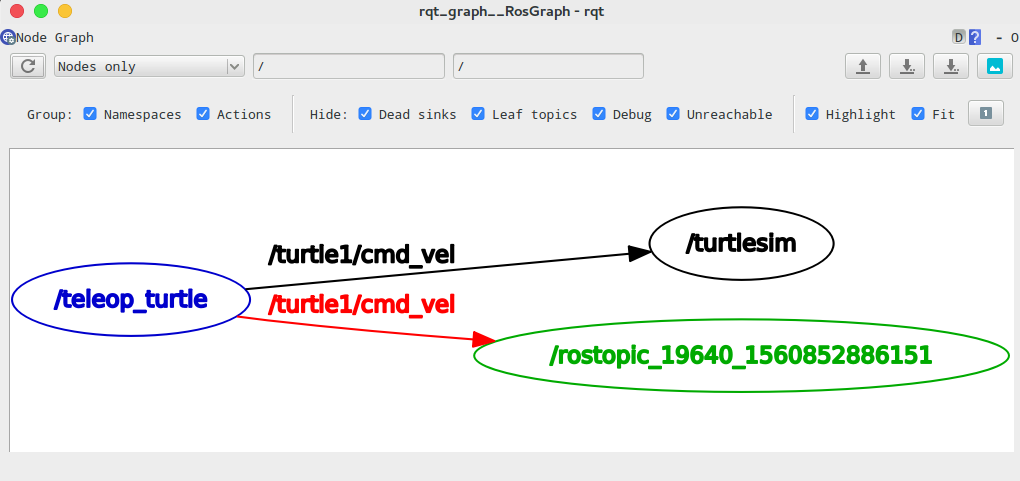
因为我们启动了 rostopic echo 程序要来获取小乌龟的数据,所以必须要订阅到对应的主题,从中获得数据才可以,这也是 rqt_graph 会多出一个 node 的原因。
rostopic list
使用这个命令可以获取当前系统发布和订阅的所有主题:
rostopic list -h
保持以上的程序运行,执行以上命令:
Published topics:
* /turtle1/color_sensor [turtlesim/Color] 1 publisher
* /turtle1/cmd_vel [geometry_msgs/Twist] 1 publisher
* /rosout [rosgraph_msgs/Log] 4 publishers
* /rosout_agg [rosgraph_msgs/Log] 1 publisher
* /turtle1/pose [turtlesim/Pose] 1 publisher
Subscribed topics:
* /turtle1/cmd_vel [geometry_msgs/Twist] 2 subscribers
* /rosout [rosgraph_msgs/Log] 1 subscriber
* /statistics [rosgraph_msgs/TopicStatistics] 1 subscriber
rostopic type
节点之间通过主题来进行数据通信,而且发布者和订阅者必须发送和接收相同数据类型的数据。
我们可以使用 rostopic type 来查看任何一个主题发布数据的类型,例如:
rostopic type /turtle1/cmd_vel
得到:
geometry_msgs/Twist
再使用 show 来得到更加详细的类型:
rosmsg show geometry_msgs/Twist
输出:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
rostopic pub
上一节学习了 topic 的 msg 类型,这次通过 pub 命令来向 topic 传递 msg,格式如下:
rostopic pub [topic] [msg_type] [args]
我们先执行下面的命令:
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
可以看到小乌龟走了四分之一圆周:
再加上 -r 参数来重复发送命令,频率为 1 Hz,让小乌龟一直走圆形:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
如下:
暂时就写这些,下次见,Bye :)
本文原创首发于微信公号「登龙」,分享机器学习、算法编程、Python、机器人技术等原创文章,扫码即可关注!

DLonng at 06/12/19