
ROS 初级 - 安装和配置 ROS 环境
版权声明:本文为 DLonng 原创文章,可以随意转载,但必须在明确位置注明出处!
这个 ROS 系列教程主要来自 ROS Wiki,加上自己学习过程中踩过的一些坑和个人理解。
1、安装 ROS
在配置 ROS 环境前要完全安装 ROS,参看之前的安装 ROS 的文章:Ubuntu 16.04 安装 Kinetic。
2、管理 ROS 环境变量
学习 ROS 环境变量的目的是为了更好的管理 ROS 项目,不同版本的 ROS 安装完都会提供一个 setup.sh 文件,当我们使用 source 命令执行某个分支的 setup.sh,即可切换到对应版本的 ROS 环境下。
要查看当前的 ROS 相关的环境变量,执行下面的命令:
printenv | grep ROS
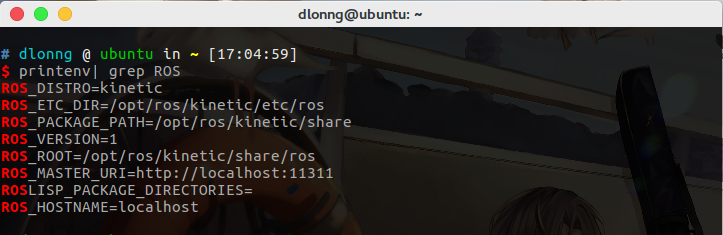
补充:这个命令的意思是把 printenv 的输出通过 Linux 下的进程间通信方式管道 来作为 grep 命令的输入,而 grep ROS 的作用是从输入中查找含有 ROS 关键字的行。
注意查看 ROS_ROOT 和 ROS_PACKAGE_PATH 的路径是否是你安装的 ROS 版本。
在我们安装完 K 版本的 ROS 后,需要在终端 source 一下对应的 setup.*sh 脚本:
source /opt/ros/kinetic/setup.bash
我使用的是 zsh:
source /opt/ros/kinetic/setup.zsh
建议你体验下 zsh,极度舒适:Ubuntu install oh-my-zsh
执行完命令后就可以使用 ROS 提供的功能了,但是当我们新开一个终端后,又要重新执行上面的命令,非常麻烦,怎么办呢?
其实非常简单,我们可以将上面的命令加到终端的启动脚本末尾,例如 bash 对应 ~/.bashrc,zsh 对应 ~/.zshrc。
补充:使用 echo $SHELL 查看你当前使用的是什么 shell。
然后用 vim 或者你喜欢的编辑器打开你终端的启动脚本,把上面的命令加到文件末尾就行了:
“ bash
source /opt/ros/kinetic/setup.bash
” zsh
source /opt/ros/kinetic/setup.zsh
3、创建 ROS 工作空间
使用下面的命令来创建一个 ROS 空间:
# 在用户主目录创建目录 catkin_ws/src
mkdir -p ~/catkin_ws/src
# 进入 ros 工作目录
cd ~/catkin_ws
# make 一下
catkin_make
执行完后,你会在当前目录下发现 build,devel 文件夹以及 src 目录下多了一个 CMakeLists.txt 文件。
在 devel 目录下,也会生成 setup.zsh(bash) 文件,我们 source devel 下的 setup.zsh(bash) 文件会覆盖之前我们在终端脚本中配置的 source 环境。
但这一步是必要的,因为以后我们编译自己的 ros 包时,需要使用当前工作目录的环境,因此需要执行这一步:
source devel/setup.zsh(bash)
我们可以再查看下环境变量:
echo $ROS_PACKAGE_PATH
/home/dlonng/catkin_ws/src:/opt/ros/kinetic/share
可以看到当前工作目录一已经被加入到 ROS 环境中了。至此,ROS 环境配置完成,下一篇开始学习 ROS 的基本命令。
本文原创首发于微信公号「登龙」,分享机器学习、算法编程、Python、机器人技术等原创文章,扫码即可关注!

DLonng at 11/12/19